پویشگر تونل و نقب مور II
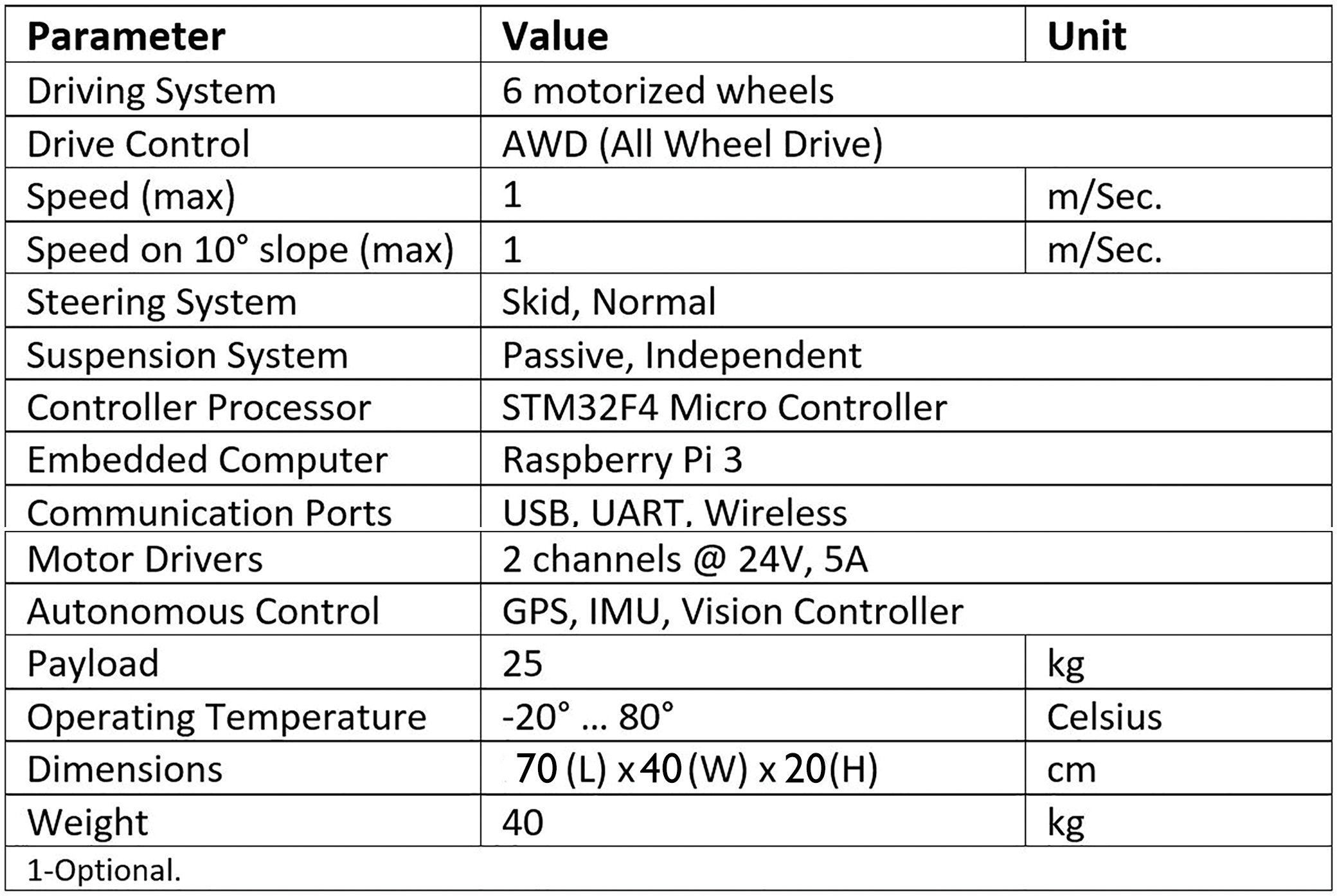
روبات MOOR II یک خودروی بدون سرنشین ۶ چرخ محرک با قابلیت کنترل از راه دور است که برای حرکت در مسیرهای ناهموار طراحی و ساخته شده است. این ربات با قابلیت حمل ۲۵ کیلوگرم تجهیزات آزمون و اندازه گیری، کاربردهای مختلفی در نقشه برداری، ارزیابی دیداری و پایش دارد. برای عبور موفق از موانع مثبت و منفی، کنترل و فنر بندی مستقل در طراحی چرخ ها منظور شده است. این ویژگی قابلیت جابجایی عمودی تا ۱۰ سانتی متر را به هر چرخ می دهد.
با اسـتفـاده از پـایـانـه هـای آزاد روبـات مـی تـوان انـواعـی از تجهیزات ( نظیر GPS ، اسکنر لیزری، تجهیزات اندازه گیری ، GPR، دوربین های دید سه بعدی و تجهیزات بازرسی و ترمیم ) را به بخش الکترونیک آن متصل کرد. ارسال فرمان های کنترلی و دریافت داده های روبات از طریق شبکه ی بی سیم با نرخ داده ی بالا انجام می گردد. همچنین می توان هدایت ربات را به صورت خود مختار و با استفاده از کامپیوتر تعبیه شده در آن برنامه ریزی کرد.
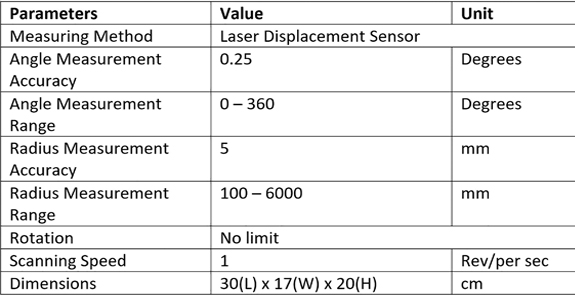
ربات MOOR II به یک کلاهک اندازهگیری لیزری مجهز است که با چرخش ۳۶۰ درجه فضای پیرامون نقب یا تونل را پویش میکند. در نتیجه مقطع تونل با استفاده از لیـزر انـدازهگیـری ابعادی میشود. با حرکت ربات در طول تونل و تکرار اندازهگیری، حجم داخلی تونل به صورت سه بعدی در کامپیوتر ثبت میگردد. در نتیجه میتوان مقاطع طولی و یا عرضی دلخواه از تونل تهیه کرد و یا حجم تونل را محاسبه نمود.
کاربردها
تصویربرداری از درون نقب و تونل
اندازه گیری سه بعدی فضای داخلی نقب و تونل
مطالعه فرسایش و مشاهده مکانهای ریزش
اندازهگیری روی تصاویر داخل نقب و تونل
پردازش تصاویر داخل نقب و تونل
کنترل کیفی عملیات حفاری و تهیه مقاطع طولی و عرضی
بازرسی فضاهای کوچک یا خطرناک