
MOOR II
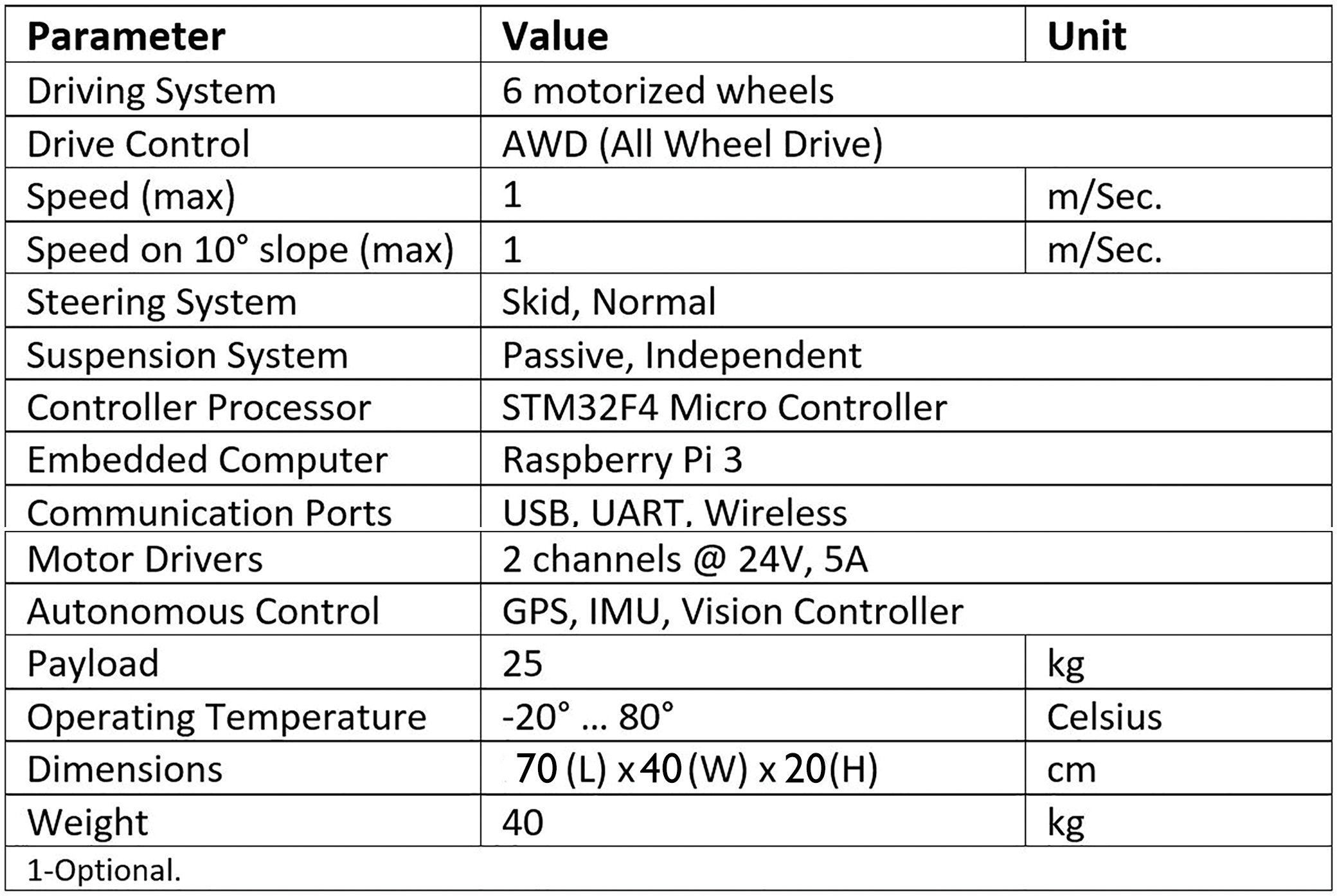
MOOR II is an unmanned 6 wheel drive, remote controlled vehicle which is designed to navigate in uneven terrain. Having a payload of 25 kg, the MOOR II robot finds wide application in surveying, visual inspection and measurement applications. Independent suspension system and motion control is designed for the wheels to make the vehicle successful in passing positive and negative obstacles. This design lets each wheel have a free vertical displacement up to 10 cm.
The robot has several open ports which can be connected to a variety of equipment (like GPS, Laser Scanner, GPR, stereo cameras and inspection and repair facilities). MOOR II receives the control commands and send data via a wireless link. The robot can also be navigated autonomously via a program which is operated by its embedded computer.
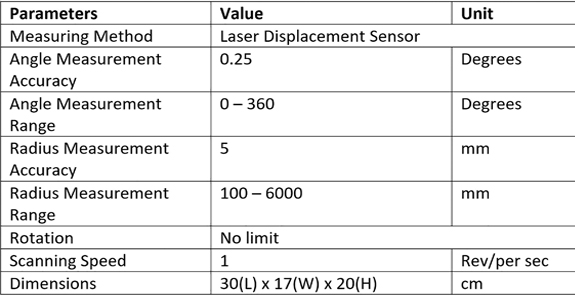
The MOOR II robot can be facilitated with a laser scanner. This scanner rotates 360 degrees and scans the tunnel interior as the robot moves along the tunnel. Consequently 3D laser measurement of the tunnel is captured. This 3D point cloud data is saved in computer and arbitrary sections along the tunnel or across it, can be produced or the tunnel volume can be calculated.
Laser Scanner Spicifications
Carriage Spicifications
Applications
Tunnel Visual Inspection
f3D Measurment of Tunnel Interiors
Erosion and Collapse Study
Measurement on Tunnel Interior Images
Processing of Tunnel Interior Images
Quality Assessment of Tunneling and Excavation
Lateral and Longitudinal Section Calculation
Inspection of Confined or Dangerous Spaces